Hệ thống khóa cửa bằng mật khẩu sử dụng pic 16f887
Hệ thống khóa cửa bằng mật khẩu được lập trình trên vi điều khiển pic16f887 bằng ngôn ngữ mikroc (Password base door lock system using 16f887).
Hệ thống bao gồm: một keypad để nhập mật khẩu. Một LCD 16×2 để hiển thị thông tin.
Chức năng: Hệ thống sẽ bắt buộc bạn đổi ngay mật khẩu lúc kích hoạt. Hiển thị mật khẩu lúc bấm. Hiển thị thông báo lỗi.
PS: đây chỉ là một project mô phỏng cho việc lập trình với keypad (không đảm bảo an toàn do bị hack)
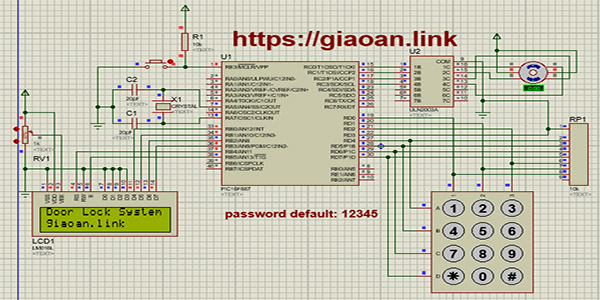
Sơ đồ đấu nối proteus
/*Project name: Password base door lock system using pic 16f887 and keypad phone 4x4, default password is 12345
Cmu: pic 16f887
Mikroc pro for pic ver 1.65
Develop: https://giaoan.link
open source: http://latesteeprojects.blogspot.com/
*/
unsigned short kp;
char code1[15] ,user1[4];
int i = 0, j, cnt;
int w1;
//keypad module connections
char keypadPort at PORTD;
//end keypad module connections
//lcd module connections
sbit LCD_RS at RB4_bit;
sbit LCD_EN at RB5_bit;
sbit LCD_D4 at RB0_bit;
sbit LCD_D5 at RB1_bit;
sbit LCD_D6 at RB2_bit;
sbit LCD_D7 at RB3_bit;
sbit LCD_RS_Direction at TRISB4_bit;
sbit LCD_EN_Direction at TRISB5_bit;
sbit LCD_D4_Direction at TRISB0_bit;
sbit LCD_D5_Direction at TRISB1_bit;
sbit LCD_D6_Direction at TRISB2_bit;
sbit LCD_D7_Direction at TRISB3_bit;
//
void code_enter(){
kp = 0; //Reset key code variable
//wait for key to be pressed and released
do
//kp = Keypad_Key_Press(); // store key code in kp variable
kp = Keypad_Key_Click(); // store key code in kp variable
while (!kp);
//prepare value for output, transform key to it's ASCII value
switch (kp){
case 1: kp = 49; break; // 1
case 2: kp = 50; break; // 2
case 3: kp = 51; break; // 3
//case 4: kp = 65; break; // A for 4x4 pad
case 5: kp = 52; break; // 4
case 6: kp = 53; break; // 5
case 7: kp = 54; break; // 6
//case 8: kp = 66; break; // B for 4x4 pad
case 9: kp = 55; break; // 7
case 10: kp = 56; break; // 8
case 11: kp = 57; break; // 9
//case 12: kp = 67; break; // C for 4x4 pad
case 13: kp = 42; break; // *
case 14: kp = 48; break; // 0
case 15: kp = 35; break; // #
//case 16: kp = 67; break; // D for 4x4 pad
}
code1[i] = kp;
Lcd_Chr(2, i+1, code1[i]); //Print key ASCII value on Lcd
i++;
}
//20ms delay function no need of it
void code_read(){ //read data from eeprom
Delay_ms(20);
user1[0] = EEPROM_Read(0x00); // Read data from address 0
Delay_ms(20);
user1[1] = EEPROM_Read(0x01); // Read data from address 1
Delay_ms(20);
user1[2] = EEPROM_Read(0x02); // Read data from address 2
Delay_ms(20);
user1[3] = EEPROM_Read(0x03); // Read data from address 3
Delay_ms(20);
}
void code_write(){ //write data to eeprom
Delay_ms(20);
EEPROM_Write(0x00,code1[0]); // Write data to address 0
Delay_ms(20);
EEPROM_Write(0x01,code1[1]); // Write data to address 1
Delay_ms(20);
EEPROM_Write(0x02,code1[2]); // Write data to address 2
Delay_ms(20);
EEPROM_Write(0x03,code1[3]); // Write data to address 3
}
void change_code(){
Lcd_Cmd(_LCD_CLEAR); // clear display
Lcd_Out(1,1, "Enter New Code:");
i = 0;
code_enter();
code_enter();
code_enter();
code_enter();
code_write();
delay_ms(20);
code_read();
delay_ms(20);
Lcd_Cmd(_LCD_CLEAR); // clear display
Lcd_Out(1,1, "New Code Set");
Delay_ms(5000);
}
void main(){
ADCON1 != 0x07;
Keypad_Init(); // Initialize Keypad
ANSEL = 0; // Configure AN pins as digital I/O
ANSELH = 0;
c1on_bit=0; // disable comparator
c2on_bit=0;
TRISC = 0x00;
PORTC = 0x00;
Lcd_Init(); // Initialize LCD
Lcd_Cmd(_LCD_CLEAR); // Clear display
Lcd_Cmd(_LCD_CURSOR_OFF); // Cursor off
code_read();
Lcd_Cmd(_LCD_CLEAR); //clear display
Lcd_Cmd(_LCD_CURSOR_OFF); // cursor off
//Lcd_Out(1, 1, msg1);
//Delay_ms(500);
Lcd_Cmd(_LCD_CLEAR); // Clear display
Lcd_Out(1, 1, "Door Lock System"); // Write message text on LCD
Lcd_Out(2, 1, "giaoan.link");
delay_ms(3000);
cnt = 0;
L1: do{
Lcd_Cmd(_LCD_CLEAR);
Lcd_Out(2, 3, "Press *");
i = 0;
code_enter();
if(code1[0] == 42){ // *
Lcd_Cmd(_LCD_CLEAR); // clear display
Lcd_Out(1, 1, "Enter Code");
//delay_ms(500);
i = 0;
code_enter();
code_enter();
code_enter();
code_enter();
code_enter();
if(code1[0] == '1' && code1[1] == '2' && code1[2] == '3' && code1[3] == '4' && code1[4] == '5' ){ // master code
code_enter();
if(code1[5] == 35){ // #
change_code();
}
}
else if(cnt<3 && code1[0] == user1[0] && code1[1] == user1[1] && code1[2] == user1[2] && code1[3] == user1[3] && code1[4] == 35){ // save password verification
Lcd_Cmd(_LCD_CLEAR); //Lcd clear
Lcd_out(1,4,"Door Open"); //Door Open
EEPROM_Read(0x21);
w1 = 1;
Delay_ms(20);
EEPROM_Write(0X21, w1);
Delay_ms(20);
EEPROM_Read(0x21);
//move stepper motor to ON position
PORTC=0x03;
Delay_ms(500);
PORTC=0x06;
Delay_ms(500);
PORTC=0x0C;
Delay_ms(500);
PORTC=0x09;
Delay_ms(500);
Delay_ms(5000);
//goto L1;
LCD_Cmd(_LCD_CLEAR);
Lcd_out(1,4,"Door Close");
EEPROM_Read(0x21);
w1 = 0;
Delay_ms(20);
EEPROM_Write(0x21, w1);
Delay_ms(20);
EEPROM_Read(0x21);
//move stepper motor to OFF position
PORTC=0x0C;
Delay_ms(500);
PORTC=0x06;
Delay_ms(500);
PORTC=0x03;
Delay_ms(500);
PORTC=0x09;
Delay_ms(500);
Delay_ms(2000);
//goto L1;
}
else{
cnt++;
Lcd_Cmd(_LCD_CLEAR); //clear display
Lcd_Out(1, 1, "Wrong Password");
Delay_ms(2000);
//goto L1;
}
if(cnt>=3)
goto L1;
}
}while(1);
}